

Overview
Scenario 19 reproduces the trajectory of a line-following robot, inspired by a real-world experiment conducted with MikroTik radios. The robot model was simplified for simulation purposes, while preserving the proportions and dimensions of the physical prototype, enabling a consistent representation of its motion and antenna position along the path. The LASSE meeting room was used as the indoor simulation environment, including multiple objects and structural elements present in the real setting to improve geometric and propagation fidelity. The robot mobility was implemented in SUMO through an equivalent pedestrian route, ensuring a controlled and repeatable trajectory. This dataset was created primarily to (i) replicate the real experiment as faithfully as possible and (ii) validate the use of a new robot-specific receiver template within the Raymobtime tool.
LASSE MEETING ROOM
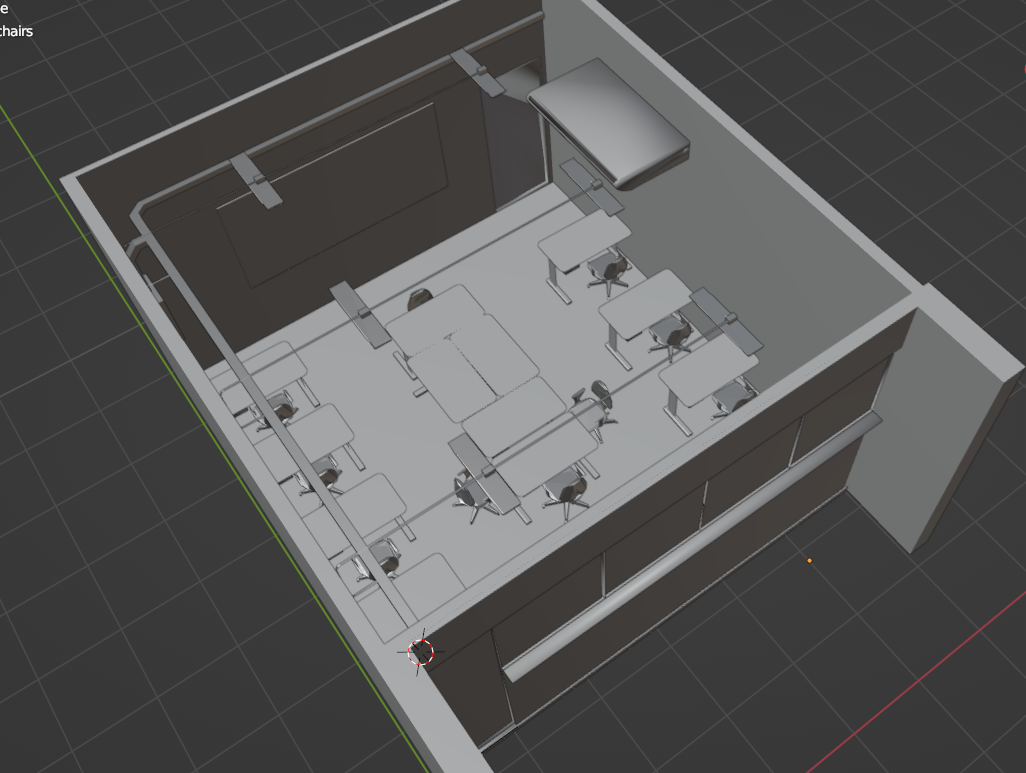
A LASSE Meeting Room scenario models a realistic indoor meeting environment based on the actual LASSE conference room. The geometry was recreated in Blender with accurate, real-world dimensions, and includes multiple elements present in the real space (e.g., walls, doors/glass partitions, a large central meeting table, surrounding desks, chairs, and other furniture). This dense and faithful object placement was intentionally adopted to keep the simulated environment as close as possible to the real site, providing rich reflecting and scattering surfaces and creating frequent occlusion opportunities typical of indoor deployments—especially around the central table area.
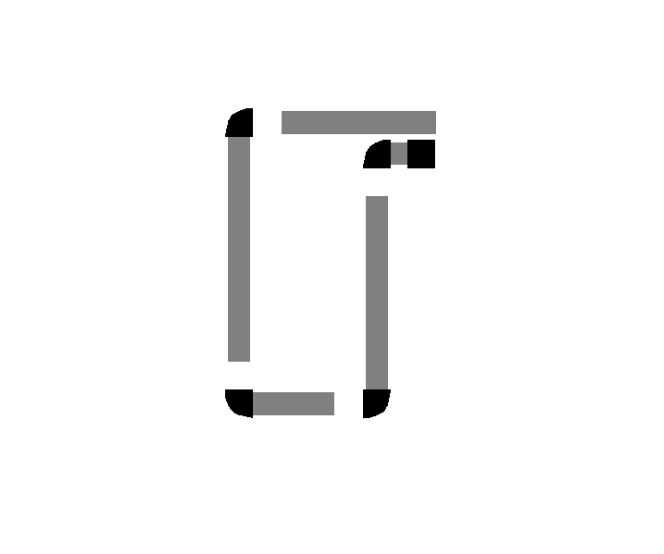
Robot mobility is defined in SUMO using a pedestrian-style route that emulates the motion of a line-following robot. The robot traverses a closed path around the meeting table, with a total route length of 15.43 m, modeled as a single-lane indoor path (number of lanes: 1) with 0.5 m effective width and an average speed of 1.34 m/s. As the robot circulates the table, the link conditions naturally vary due to furniture-induced blockages and cornering, making the scenario well-suited for evaluating indoor propagation effects (multipath, partial/complete blockage) and beam-management behavior under controlled, repeatable motion in a high-fidelity room model.
Collected Data
The collected data was generated using the Raymobtime pipeline, which couples vehicular and ´pedestrian traffic simulation in SUMO with scene generation and ray-tracing in Remcom Wireless InSite (WI) via a Python orchestrator.
1. Ray tracing data: top 100 rays of highest received power, obtained from Wireless Insite (WI).
- Received power, time of arrival, elevation angle of departure, azimuth angle of departure, elevation angle of arrival, azimuth angle of arrival, LOS condition.
- Type data: .hdf5 of each episode
- At database .db file is possible take rays paths and interactions information.
Data Visualization
Dataset details
| 3D scenario | LASSE indoor |
| Frequency | 60 GHz |
| Number of receivers and type | 1 Mobile Robot |
| Number of episodes | 1 |
| Number of scenes per episode | 442 |
| Time between scenes | 200 ms |
| Number of runs | 442 |
Simulation details
- Traffic parameters (Simulator of Urban Mobility)
| Number of lanes | 1 |
| Vehicles | Robot |
| Lengths (m) | 0.5 |
| Heights (m) | 0.7 |
| Average speed (m/s) | 1.34 |
| Sampling period (s) | 0.2 |
- Elements and materials (WI)
| Elements | Material |
| Chair | One-layer dieletric Permittivity = 2.5 Conductivity = 0.015 Thickness = 3 |
| Floor | ITU Concrete 60GHz |
| Ground | ITU Concrete 60GHz |
| White Board | One-layer dieletric Permittivity = 4 Conductivity = 0.015 Thickness = 0.006 |
| Lamps | PEC Metal |
| Canalete | PEC Metal |
| Door | PEC Metal |
| Table | PEC Metal |
| Outdoor | PEC Metal |
| Spliters | PEC Metal |
| Walls | ITU Concrete 60GHz |
| Window Frame | PEC Metal |
| Window Glass | ITU Glass 60GHz |
| Table | ITU Wood 60GHz |
| Robot | PEC Metal |
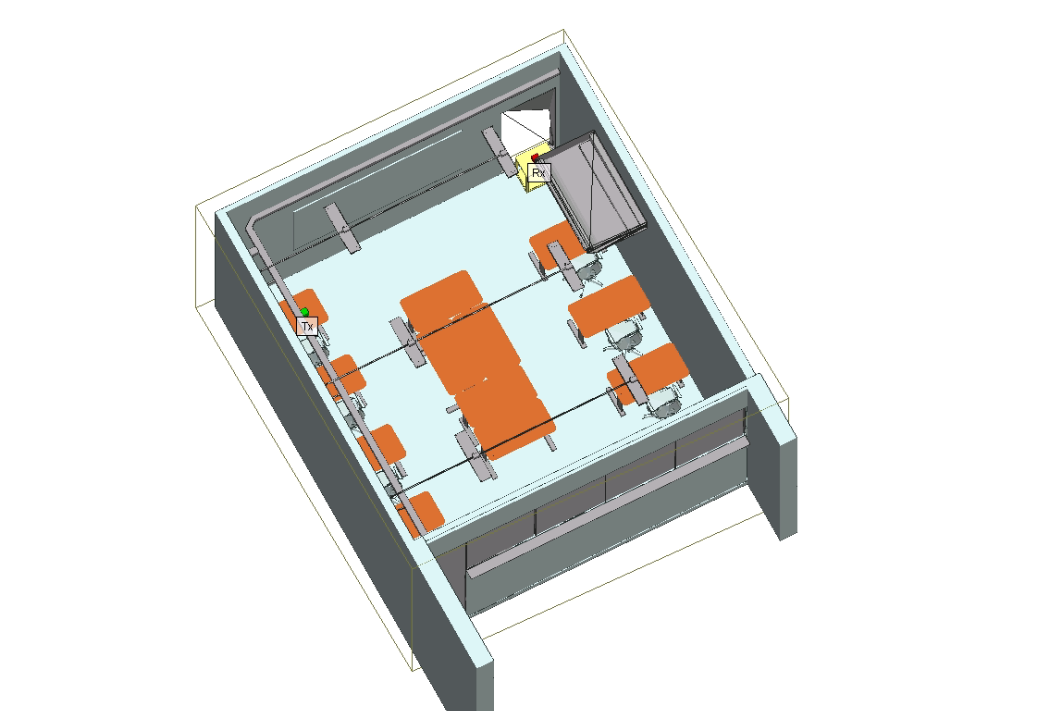
- Transmitter details (WI)
| Number and type | 1 Fixed |
| Antenna type | Isotropic |
| Input power | 0 dbm |
| Position (x,y,z) (m) | 1.03, 7.78, 0.8 |
- Receiver details (WI)
| Number and type | 1 Mobile |
| Plataform type | Point |
| Antenna type | Isotropic |
| Noise figure | 3 dbm |
- Ray tracing configuration (WI)
| Propagation model | X3D |
| Number of reflections | 6 |
| Number of transmissions | 0 |
| Number of diffractions | 1 |
| Number of rays | 100 |
| Ray spacing | 1° |
- Diffuse Scattering configuration (WI)
| Diffuse scattering | Habilited |
| Model | Lambertian |
| Max reflections | 2 |
| Max transmissions | 0 |
| Max diffractions | 1 |
- Signal Information (WI)
| Signal type | Sinusoid |
| Frequency | 60 GHz |
| Bandwidth | 1 MHz |
Wireless Insite:
The LASSE scenario used at simulations corresponds to a 3-D model that is part of Wireless insite examples.
The simulation was realized at wireless insite 3.3
Download
Files and folders explanation
📁 1. s000_episodedata — Objects and rays database (db)
Database with tables where episodes, scenes, mobile objects and receivers are related.
Tables:
[episodes, scenes, objects, rays, receivers]
Util information at tables:
– Rays (table)
[id, departure_elevation, departure_azimuth, arrival_elevation, arrival_azimuth, path_gain, time_of_arrival, interactions, receiver_id]
– Receiver (table)
[id, total_received_power, mean_time_of_arrival, object_id]
– Object (table)
[id, name, scene_id]
– Scene (table)
[id, episode_id]
📁 2. ray_tracing_data_s000_carrier60GHz/ — Rays Information (HDF5)
The ray-traced data is stored in HDF5 format using a four-dimensional structure:
Structure:[number of scenes, number of TX–RX pairs, maximum number of rays, number of stored parameters]
Each ray contains:
- Received power (dBm)
- Time of arrival (seconds)
- Elevation angle of departure (degrees)
- Azimuth angle of departure (degrees)
- Elevation angle of arrival (degrees)
- Azimuth angle of arrival (degrees)
- LOS flag: 1 = LOS, 0 = NLOS
This data enables high-fidelity reconstruction of multipath behavior, reflections, diffractions, and critical LOS/NLOS transitions.
📁 3. documentation/ — README and Citation Information
This folder contains:
- Dataset README
- License and usage rules
- Citation generator references
- Links to related academic papers
- Change logs or updates